

计量学中的三角测量
经过验证的原理,未来可期
精度和可靠结果是计量工作的重中之重。这是保证部件符合质量和安全标准的唯一途径。三角测量法,即通过基于三角形来计算角度从而进行距离测量的方法,是一种可用于记录物体表面情况的测量手段。在本页中,您将了解三角测量法在计量学中的应用,以及结构光投影和光切法的原理。
三角测量法简介
在计量学中,三角测量法是借助单个激光点和激光线或如上图所示的整个光斑来测量物体。一台或多台配备传感器的相机记录光线从物体反射的角度,或光线图案在物体表面变形的角度,以及亮度和距离。通过这种方式,光照和角度测量可生成被测物体表面的整体图像。
早在17世纪,三角测量法就已在欧洲和美洲使用,不过是用于土地测量。这一原理便起源于此。使用三角测量法测量时,将一个区域划分为若干三角形来测量距离。对于三角形,只需知道角度和基线,就能用三角函数轻松计算出未知的长度。
如今,三角测量原理的应用远远超出了土地测量的范畴,可用于摄影测量或三维扫描等。在计量学中,三角测量主要用于检测部件。为此,有两种不同的三角测量法:
- 结构光投影(条纹投影)
- 激光三角测量(利用光切法进行三角测量)
激光三角测量使用单个激光点或激光线,这些点或线反射自被测物体,然后被传感器检测到。根据结构光投影原理,一个大型光图案会投射到要测量的物体上。一台或多台配备传感器的相机捕捉在物体表面变形的光图案形状。这两种方法在计量学中都经常使用;根据测量任务的不同,其中一种或另一种测量原理更为合适。深入了解使用激光和条纹投影进行三维三角测量的方法,找到适合您项目的方法。
结构光投影的工作原理是什么?
在使用条纹投影的三角测量法中,以条纹或点的形式将不同的光图案依次投射到测试物体上,以便在三维模型中绘制出精准形状。为此,需要将一台投影仪和旁边至少一台(通常是两台)带传感器的相机对准一个平面。相机可识别自己与物体表面之间的距离,以及光图案投射到物体上的角度。使用结构光投影开始测量时,先将测试物体放在表面上。光图案被投射到物体上,并根据表面形状进行变形。相机捕捉到这些变形后的点或条纹图案,为计算观察视野中表面上每个点的距离提供所需信息。其结果就是点云(STL网格),即由许多小测量点组成的被测物体的精准图像。
用于条纹投影扫描的光可以是蓝光或白光。不过,通常使用蓝光来减少衍射和环境光对测量的影响。放置目标的表面通常是黑色的,以避免光反射。


条纹投影法可以用来做什么?
由于扫描速度快,特别是可同时采集多个测量数据,结构光投影非常适合工业检测任务,例如:
- 形状、位置和轮廓控制
- 面积比较、目标/实际对比
- 完整性
- 部件在组件中的位置
- 切割定位
结构光投影原理也经常用于取证,因为它适用于测量非常小的物体。条纹投影对于透明或强反射的物体并不适用。
结构光投影的优缺点
结构光投影的优势:
- 具有恒定分辨率的三维面积信息
- 测量点密度高
- 测量速度快
- 灵活便携的测量装置
结构光投影的缺点
- 对投影技术的要求更高
- 半透明或反光表面可能需要预处理
- 环境光会影响测量结果
- 粗糙的表面难以用激光点测量距离(激光线不受影响)
三角测量如何与光切法配合使用?


光切法的测量设置与结构光投影法类似,均是基于三角测量法。测量物体放置在一个平面上,通常是一个旋转台,在其上方放置一个投影仪和相机或传感器。这三个点构成了用于计算的三角形。不过,与条纹投影(将条纹或点图案投射到目标上)相比,激光三角测量法仅使用单个激光点或激光线。这里的决定性因素也不是光在表面上的直接变形,而是光线的反射。被测物体的表面会反射出投射到相机方向的激光线或点。相机检测反射,并根据反射角度计算出观察视野中每个点的距离。
由于激光线或点在一次扫描中只能捕捉物体的一部分,而不能像结构光投影那样扫描整个表面,因此必须移动测量物体或传感器。因此,稳定的测量装置对使用光切法进行三角测量至关重要,以确保测量的高精度。
激光三角测量法可以用来做什么?
利用激光三角测量原理,可以在微米级范围内进行精准测量。但使用光切三角测量法,即使距离更远也不成问题。因此,这种三角测量法是工业生产流程中常用的测量方法。它可用于质量控制、轮廓和外形测量,以及材料厚度、振动和距离确定。利用激光光学三角测量技术,可以及早检测出有缺陷的物体,并将其从生产流程中移除,以便进行维修或回收。对于有光泽的金属,使用激光三角测量通常比使用条纹投影测量效果更好。因为条纹测量原理中,反射可能会提供错误的信号,而激光法恰恰是利用这种反射。然而,在使用三角测量时,过于光亮的表面仍会造成问题。激光三角测量原理还广泛用于包装和木材行业、物流、医疗技术和电子生产。
激光三角测量使用蓝色或红色激光。红色激光能穿透目标,而蓝色激光则能在目标表面形成清晰的点或线。此外,蓝色激光能在测量发光物体时提供准确的结果,而红光传感器会受到红色发光金属的干扰,产生错误信号。对于深色表面,红色激光器能提供更高的光强度,因此更具优势。红色激光还可对粗糙表面进行三角测量,蓝光更适用于光滑表面。
三维激光扫描的优缺点
激光扫描仪的优势:
- 不受环境光线条件影响
- 测量精度高
- 测量速度快
- 测量头可安装在现有的测量系统上,例如三坐标测量机上
- 可测量光亮金属
激光扫描仪的缺点:
- 激光粒化和移动可能导致分辨率降低
- 没有工艺可靠性,因为测量结果受温度影响
- 高亮度或半透明物体难以测量
使用ATOS测量头进行三角测量法以获得高精度
使用ATOS三角测量头,您可以进行精准的测量,并获得可靠的结果。通过两台相机和一台投影仪,可以使用结构光投影法和光切法进行测量。
ATOS三维数字扫描仪的特别之处在于:左右三角测量传感器可单独与投影仪结合使用。这意味着一次扫描就能捕捉到被测物体的三个不同视图。这可以节省大量时间,因为即使是复杂的部件,单个扫描的次数也会大大减少。
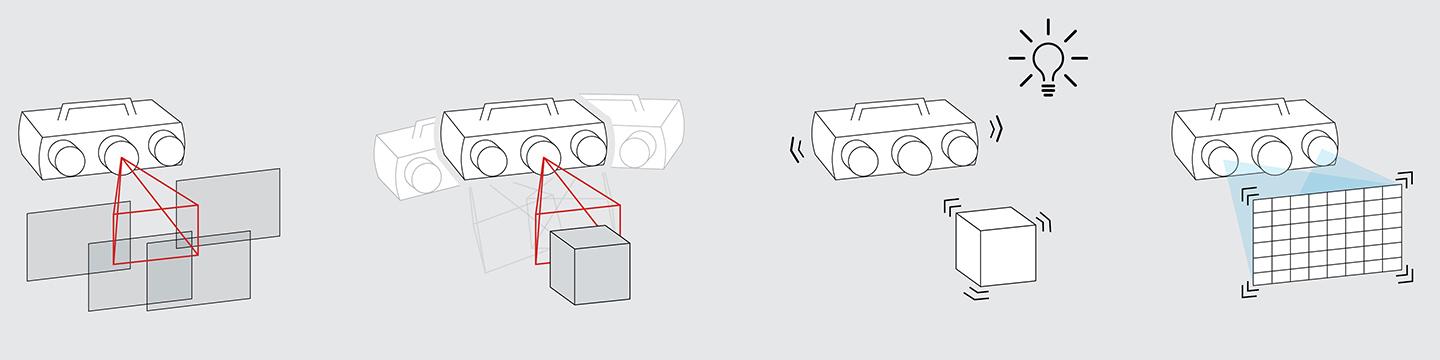
这种三重扫描(Triple Scan)方法的另一个优点是多因素确定。通过同时使用两台相机捕捉部件,收集到的信息比绘制三维模型所需的信息还要多。更多的数据意味着更高的精度。检测传感器和目标的运动以及环境变化,检查变换精度,并实时跟踪三维传感器位置,这样就能以高精度进行测量,并提高工艺可靠性。下图显示了通过ATOS测量头进行多因素确定的三重扫描流程。

在结构光投影中,ATOS三角测量头与蓝光技术(Blue Light Technology)配合使用:投影装置发出的窄带蓝光使扫描仪能够在任何环境光线条件下进行精密测量,即使是光亮的表面也不例外。由于三角测量传感器的全面运作,可以生成精准的物体图像。
使用条纹投影进行测量时,需要将结构化的条纹图案投射到待测物体上。在扫描过程中,编码条纹图案迅速变化,人眼几乎看不到。这就是条纹光扫描仪的功能所在。两个三角测量传感器可检测到不断变化的条纹,并利用它们通过光学变换方程计算出每个相机像素的三维坐标。因此,只需几秒钟就能无接触地捕捉到数百万个测量点的细微之处。传感器软件可自动创建高分辨率点云,呈现测量对象的精准图像。
出类拔萃:使用ATOS和TRITOP测量复杂物体
通过ATOS测量头和TRITOP摄影测量系统的强大组合,即使检测大型复杂物体也不成问题。TRITOP用于测量部件上的参考点,而ATOS则利用参考点自动转换单个测量值。这样就能获得高精度,并在很大程度上避免重复测量。这一出色的组合尤其适用于首件检测、工具制造和汽车白车身检测。您也可将ATOS和TRITOP的强大组合应用于复杂的测量流程。



